410-L1 机载高光谱成像激光雷达系统

410-L1是一款灵活高效的机载高光谱激光雷达系统,集成了高光谱成像、激光雷达、测绘相机、数据采集系统等组件,可搭载于M300 RTK无人机进行同步作业,也可以分别独立运行,更为方便灵活,可满足更多应用需求,在环境遥感、精准农业、森林调查、植被评估和管理、电力巡线、以及矿产勘查等领域具有广泛的应用前景。
功能特点
▶ 基于Web的GUI直接控制和操作
▶ 可选择测量波段,提高作业效率
▶ 具有预编程嵌入式处理器和控制系统
▶ 一体式高精度云台,Skyport排线接口
▶ 可同步作业,也可以分别独立运行
▶ 一体化激光雷达、测绘相机与高精度惯导
▶ 高效率:单架次作业面积可达2Km2
▶ 高精度:高程精度5cm,平面精度10cm
▶ 测量距离:450m(反射率80%),三次回波
▶ 实时点云上色、建模数据存储、点云显示
应用领域
▶ 精准农业
▶ 矿物石油勘探
▶ 管道/电力/高速公路
▶ 地形/植被/城市特征
▶ 森林调查
▶ 低空遥感
▶ 防灾减灾
▶ 环境评价与监控
410-L1可搭载于M300无人机同步测量,也可以分别独立运行,灵活高效,满足多种应用需求:


技术参数
|
410-L1机载高光谱成像激光雷达系统 |
|
|
光学设计 |
高量子效率探测器及高反射衍射光栅 |
|
光谱范围 |
400 nm ~ 1000 nm |
|
采样间隔 |
2 nm |
|
波段数 |
1~150可选 |
|
空间维 |
682*80000像素/Cube |
|
镜头规格 |
16 mm, f/1.4, FOV: 29.5度 |
|
最高帧频 |
300 Hz |
|
存储空间 |
内置800GB固态存储 |
|
数据选择 |
可获取全部波段或仅选取特征波段,也可选择子集 |
|
软件功能 |
基于Web的GUI,兼容多种浏览器,可以远程控制 |
|
机身端口 |
Ethernet+Esata+USB3.0,实时图传 |
|
激光量程 |
450m @ 80% 0klx; 190m @ 10% 100klx |
|
回波及数据率 |
2-3回波:最大480000点/秒 |
|
实时点云上色模式 |
反射率、高度、距离、真彩 |
|
测距精度 |
3cm @ 100m |
|
FOV |
重复扫描:70.4°×4.5°;非重复扫描:70.4°×77.2° |
|
IMU更新频率 |
200Hz |
|
角速度计量程 |
±2000dps |
|
航向精度 |
实时:0.3°,后处理:0.15° |
|
俯仰/横滚精度 |
实时:0.05°,后处理:0.025° |
|
防护等级 |
IP54 |
|
一测绘相机 |
1英寸传感器,有效像素2000万 |
|
图像尺寸 |
5472×3078(16:9);4864×3648(4:3) |
|
光圈 |
f/2.8 - f/11 |
|
录像分辨率 |
H.264,4K:3840×2160 30p |
|
辅助定位相机 |
1280×960像素,FOV 95° |
|
无刷云台 |
双Skyport排线接口,角度抖动量0.01° |
|
测量角度 |
俯仰:-120°至+30°;平移:±320° |
|
原始数据存储 |
照片/IMU/点云数据存储/GNSS 数据/标定文件 |
|
点云数据存储 |
实时建模数据存储 |
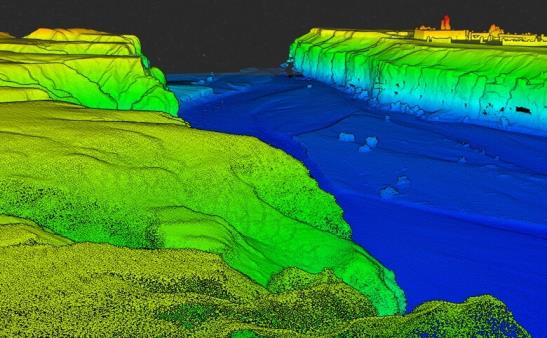
数据实例

上图为高光谱数据图像,下图为激光雷达数据图